Datasets
We share here a number of datasets connected to human-robot interaction and other areas of our research that were collected during our work. For further information follow the links for the specific dataset.
Shopping center person tracking and 3-D range sensor datasets
![]() This dataset contains person tracking data as well as raw measurements taken using 3-D range sensors obtained during a one year collection in a large area of a shopping and bussines center in Osaka, Japan.
This dataset contains person tracking data as well as raw measurements taken using 3-D range sensors obtained during a one year collection in a large area of a shopping and bussines center in Osaka, Japan.
Trajectories of people approaching the robot to interact
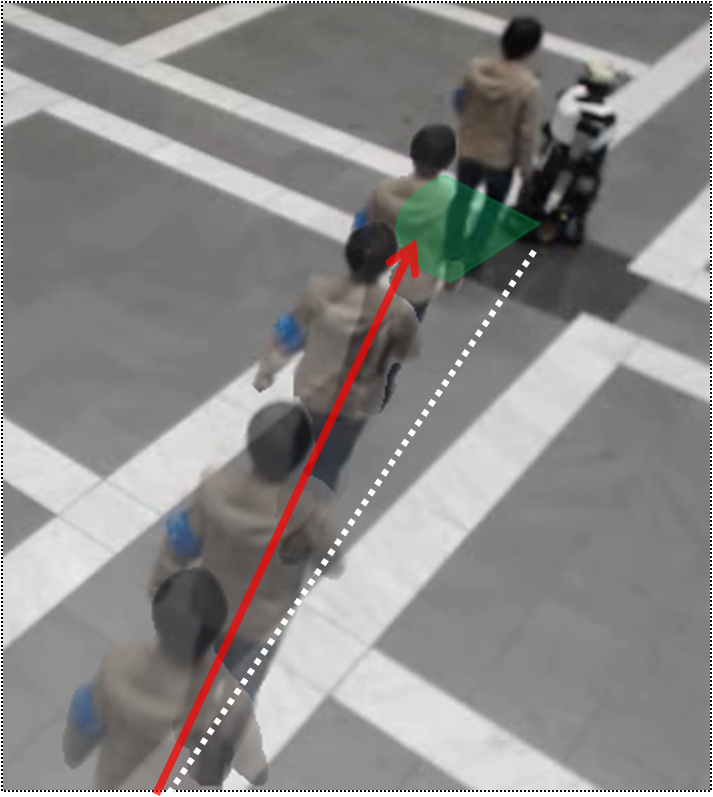 We collected people’s trajectories around a robot in a shopping mall using a people-tracking system. This dataset contains trajectories of both people approaching the robot to interact and people with other intentions.
We collected people’s trajectories around a robot in a shopping mall using a people-tracking system. This dataset contains trajectories of both people approaching the robot to interact and people with other intentions.
Pedestrian tracking with group annotations
 This dataset contains pedestrian tracking data taken in two different environments, as well as corresponding group annotations.
This dataset contains pedestrian tracking data taken in two different environments, as well as corresponding group annotations.
Shopping mall dataset captured by a traversing robot
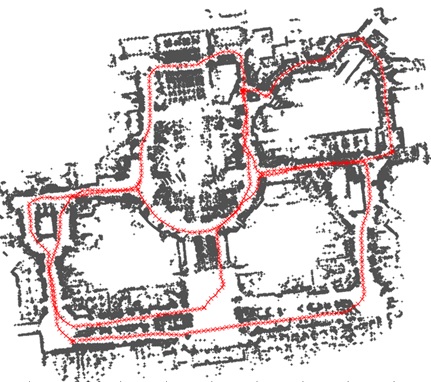 This dataset contains seven recordings of raw measurements recorded using velodyne lidar sensor, an IMU and robot odomertry obtained during three consecive days in shopping mall (Temposan) near osaka aquarium in Osaka, Japan.
This dataset contains seven recordings of raw measurements recorded using velodyne lidar sensor, an IMU and robot odomertry obtained during three consecive days in shopping mall (Temposan) near osaka aquarium in Osaka, Japan.