
以下は人とロボットのインタラクション等の実験のときに収集されたデータの一部を共有しています。詳しくはそれぞれのデータセットのページをご覧ください。
人位置推定や3次元距離画像センサのデータセット
![]() 3次元距離画像センサを使用し、大阪のショッピングセンターで人位置推定を行いました。このデータセットは位置推定の結果やセンサのローデータを含めています。
3次元距離画像センサを使用し、大阪のショッピングセンターで人位置推定を行いました。このデータセットは位置推定の結果やセンサのローデータを含めています。
インタラクションを行うつもりでロボットに接近している人の軌跡
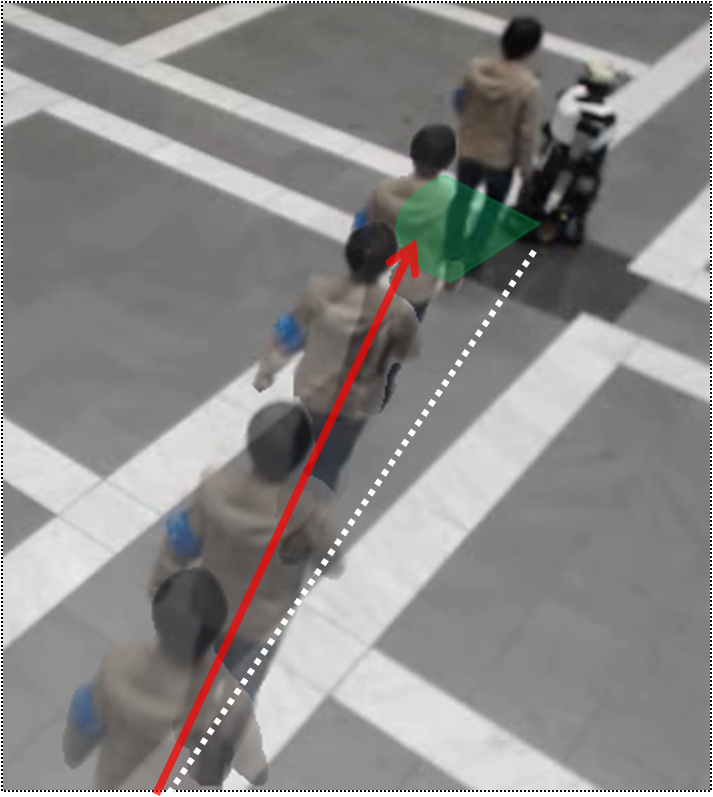 人位置推定システムを用いて、大阪のショッピングモールロボットの周りの人の軌跡を記録しました。このデータセットは,インタラクションを行うつもりでロボットに接近している人の軌跡と、そうでない人の軌跡が含まれています。
人位置推定システムを用いて、大阪のショッピングモールロボットの周りの人の軌跡を記録しました。このデータセットは,インタラクションを行うつもりでロボットに接近している人の軌跡と、そうでない人の軌跡が含まれています。
グループのラベル付け
 このデータセットは二つの環境で撮った人の軌跡のデータやグループのラベル付けが含まれています。
このデータセットは二つの環境で撮った人の軌跡のデータやグループのラベル付けが含まれています。
Shopping mall dataset captured by a traversing robot
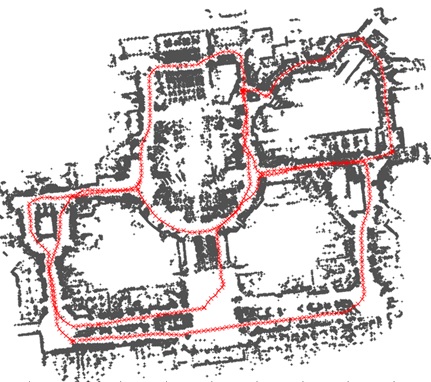 This dataset contains seven recordings of raw measurements recorded using velodyne lidar sensor, an IMU and robot odomertry obtained during three consecive days in shopping mall (Temposan) near osaka aquarium in Osaka, Japan.
This dataset contains seven recordings of raw measurements recorded using velodyne lidar sensor, an IMU and robot odomertry obtained during three consecive days in shopping mall (Temposan) near osaka aquarium in Osaka, Japan.